This article on matrices is part two of an ongoing crash course on programming with linear algebra, demonstrating concepts and implementations in Python. The following examples will demonstrate some of the various mathematical notations and their corresponding implementations, easily translatable to any programming language with mature math libraries.
Linear Algebra: Python Series - View all articles in this series.
Previous articles in this series:
This series began with the vectors article linked above. Vectors are the building blocks of matrices, and a good foundational understanding of vectors is essential to understanding matrices.
This article covers some matrix notation, common matrix types, methods of addition and multiplication and rank. Future articles will cover additional concepts.
This small series of articles on linear algebra is meant to help in preparation for learning the more profound concepts related to Machine Learning, AI and math that drives the higher level abstractions provided by many of the libraries available today.
Python examples in this article make use of the Numpy library. Read the article Python Data Essentials - Numpy if you want a quick overview of this important Python library along with the Matplotlib Python library for visualizations. For a beginners guide to Matplotlib might try my article Python Data Essentials - Matplotlib and Seaborn
import numpy as np
import matplotlib.pyplot as plt
import math
from mpl_toolkits.mplot3d import Axes3D
import seaborn as sb
%matplotlib inline
§2026 Update
The math here is unchanged. A few libraries moved on since 2018, so the code below has been brought up to date for current NumPy and Matplotlib.
A couple of things are worth knowing if you write your own. np.complex is gone, removed in NumPy 1.24; it was only ever an alias for Python’s built-in complex, so use complex (or np.complex128) for complex matrices. For 3D plots, create the axis with fig.add_subplot(projection='3d'); the older fig.gca(projection='3d') no longer works.
The one to really keep in mind is np.matrix. Parts of this article use it because it makes * mean matrix multiplication and makes column vectors read cleanly, but NumPy has discouraged it for years. For new code, use ordinary 2D arrays with the @ operator, which is what most of the examples here already do for multiplication. NumPy 2.0 arrived in 2024, and nothing here is affected by it.
The article continues below. The 2026 Update above covers what’s changed; the code examples have been updated to run on current NumPy and Matplotlib.
§Matrix Notation
It is common to note a matrix with a capital letter. The following is a three by two matrix of Real numbers.
# python matrix
c = np.array([[10,5],[-20,2],[np.pi,1.5]])
c
array([[ 10. , 5. ],
[-20. , 2. ],
[ 3.14159265, 1.5 ]])
Matrix dimensions are noted by row first and then column. The matrix $\boldsymbol{D}^{3\times4}$ contains three rows and four columns.
§Accessing Elements
Subscript numbers represent an element in a matrix by row and column. Access elements of the matrix $\boldsymbol{D}$ with the notation $d_{ij}$ where ${i}$ is the row and ${j}$ is the column.
d = np.array([[10,5,2,1],[-20,2,3,6.6],[np.pi,1.5,2,0]])
d
array([[ 10. , 5. , 2. , 1. ],
[-20. , 2. , 3. , 6.6 ],
[ 3.14159265, 1.5 , 2. , 0. ]])
Python, like many computer languages, starts indexing at zero. The example below implements ${d}_{2,4} = 6.6$ in Python.
d[1][3]
6.5999999999999996
§Common Matrix Types
The following section describes a handful of matrix types.
§Square and Rectangular Matrices
Matrices are Square (${m} = {n}$) or Rectangular (${m} \neq {n}$)
The following is a square matrix of fives, where ${m}=2$ and ${n}=2$:
# numpy.full(shape, fill_value, dtype=None, order='C')[source]
# Returns a new array of given shape and type, filled with fill_value.
l = np.full((2,2), 5)
l
array([[5, 5],
[5, 5]])
The following is a rectangular matrix $\boldsymbol{P}_{3,2}$ of fours, where ${m}=3$ and ${n}=2$:
p = np.full((3,2), 4)
p
array([[4, 4],
[4, 4],
[4, 4]])
§Zero (null) Matrices
A Zero matrix only contains zeros and may be square (${m} = {n}$) or rectangular (${m} \neq {n}$).
np.zeros((2,2))
array([[ 0., 0.],
[ 0., 0.]])
§Diagonal Matrices
Diagonal matrices may be Square or Rectangular contain only zeros for off-diagonal entries, however, elements in the main diagonal are unrestricted and may also be zero.
The above matrix $\boldsymbol{W}$ is diagonal in that every ${w}_{i}$ row and $w_{ij}$ column in the range $1, 2, \ldots, n$ where $i \ne j$ then $w_{i,j} = 0$.
$\forall i,j \in {1, 2, \ldots, n}, i \ne j \implies w_{i,j} = 0$
# create the square diagonal matrix W
w = np.diag([2,3,5,7,9])
w
array([[2, 0, 0, 0, 0],
[0, 3, 0, 0, 0],
[0, 0, 5, 0, 0],
[0, 0, 0, 7, 0],
[0, 0, 0, 0, 9]])
w.shape
(5, 5)
Diagonal elements in a rectangular matrix.
# Create the rectangular diagonal matrix G
# by appending a column vector of zeros
cz = np.full((w.shape[0],1), 0)
# by appending a column by axis=1
g = np.append(w, cz, axis=1)
g
array([[2, 0, 0, 0, 0, 0],
[0, 3, 0, 0, 0, 0],
[0, 0, 5, 0, 0, 0],
[0, 0, 0, 7, 0, 0],
[0, 0, 0, 0, 9, 0]])
g.shape
(5, 6)
§Identity Matrices
Identity matrices are square (${m} = {n}$) and contain ones across the diagonal with zeros elsewhere. Identity matrices are noted with the symbol $\boldsymbol{I}$
$\forall i,j \in {1, 2, \ldots, n}, i \ne j \implies w_{i,j} = 0$
$\forall i,j \in {1, 2, \ldots, n}, i = j \implies w_{i,j} = 1$
eye = np.eye(5)
eye
array([[ 1., 0., 0., 0., 0.],
[ 0., 1., 0., 0., 0.],
[ 0., 0., 1., 0., 0.],
[ 0., 0., 0., 1., 0.],
[ 0., 0., 0., 0., 1.]])
It is common to see a constant value next to the identity matrix symbol $\boldsymbol{I}$ such as $5\boldsymbol{I}$.
5 * eye
array([[ 5., 0., 0., 0., 0.],
[ 0., 5., 0., 0., 0.],
[ 0., 0., 5., 0., 0.],
[ 0., 0., 0., 5., 0.],
[ 0., 0., 0., 0., 5.]])
§Triangular Matrices
Triangular matrices are categorized as upper or lower with zeros above or below the diagonal.
Upper triangular matrix:
Lower triangular matrix:
# create an array of numbers, 1...9
nums = np.arange(1,10)
nums
array([1, 2, 3, 4, 5, 6, 7, 8, 9])
# reshape the array into a 3x3 matrix
mx = np.reshape(nums, (3,3))
mx
array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
# create an upper triangular matrix
u = np.triu(mx)
print(f'matrix U:\n{u}')
matrix U:
[[1 2 3]
[0 5 6]
[0 0 9]]
# create a lower triangular matrix
l = np.tril(mx)
print(f'matrix L:\n{l}')
matrix L:
[[1 0 0]
[4 5 0]
[7 8 9]]
§Transposed Matrix
Transposing flips a matrix over its diagonal. A transposed matrix may be noted as $\boldsymbol{I}^T$ or $\boldsymbol{I}’$. Transposing is easy to see when using one of the triangular matrices above.
Lower triangular matrix:
Transposed:
Every i-th row, j-th column have been transposed:
$\boldsymbol{L}^T_{i j} = \boldsymbol{L}_{j i}$
print(f'matrix L:\n{l}')
matrix L:
[[1 0 0]
[4 5 0]
[7 8 9]]
# note: zero based index
# i (row 3) and j (colum 1)
l[2][0]
7
# transpose L (also. np.transpose(l))
l.T
array([[1, 4, 7],
[0, 5, 8],
[0, 0, 9]])
# i (row 1) and j (colum 3)
l.T[0][2]
7
§Symmetric & Skew-symmetric Matrices
Symmetric & Skew-symmetric matrices have values that correlate to the transposed position above and below the diagonal. A symmetrical matrix can be expressed as $\boldsymbol{V}^T = \boldsymbol{V}$. A skew-symmetric matrix can be expressed as $\boldsymbol{W}^T = -\boldsymbol{W}$.
# Using the upper triangle matrix from above
u
array([[1, 2, 3],
[0, 5, 6],
[0, 0, 9]])
$\boldsymbol{S} = \boldsymbol{U} + \boldsymbol{U}^T$
# Add the upper triangle matrix to a transposed
# version of itself. We are not concerned with the diagonal.
s = u + u.T
print(f'matrix S:\n{s}')
matrix S:
[[ 2 2 3]
[ 2 10 6]
[ 3 6 18]]
Check the matrix $\boldsymbol{S}$ for symmetry. Does $\boldsymbol{S}^T = \boldsymbol{S}$ ?
# is the s matrix is symmetric
np.array_equal(s, s.T)
True
Another method for creating a symmetric matrix involves multiplying a matrix by its transpose.
G = np.arange(1,10).reshape(3,3)
G @ G.T
array([[ 14, 32, 50],
[ 32, 77, 122],
[ 50, 122, 194]])
Next, create a skew-symmetric matrix by using the same upper triangle matrix, and creating a transposed additive inverse of it, then add the two matrices together.
$\boldsymbol{V} = -\boldsymbol{U} + \boldsymbol{U}^T$
v = (u * -1) + u.T
print(f'matrix V:\n{v}')
matrix V:
[[ 0 -2 -3]
[ 2 0 -6]
[ 3 6 0]]
Check for skew-symmetric $\boldsymbol{V}^T = -\boldsymbol{V}$
# is the s matrix skew-symmetric?
np.array_equal(v.T, (v * -1))
True
§Augmented Matrices
Augmented matrices often used for solving a system of equations, they are the concatenation of two matrices with the same number of rows (${m} = {m}$).
print(f'matrix L:\n{l}\n')
print(f'matrix U:\n{u}')
matrix L:
[[1 0 0]
[4 5 0]
[7 8 9]]
matrix U:
[[1 2 3]
[0 5 6]
[0 0 9]]
a = np.append(l, u, axis=1)
print(f'Augmented matrix A:\n{a}')
Augmented matrix A:
[[1 0 0 1 2 3]
[4 5 0 0 5 6]
[7 8 9 0 0 9]]
§Complex Matrices
Complex matrices, often noted as $\mathbb{C}$, contain complex numbers.
# create a zero matrix of the data type complex
p = np.zeros((3,3), dtype=complex)
p[0][1] = 1 + 1 + 7j
print(f'Complex matrix P:\n{p}')
Complex matrix P:
[[ 0.+0.j 2.+7.j 0.+0.j]
[ 0.+0.j 0.+0.j 0.+0.j]
[ 0.+0.j 0.+0.j 0.+0.j]]
p[0][0]
0j
§Matrix Addition
Matrix addition and subtraction works only with matrices of equal size (m by n). The entrywise sum is calculated by adding each value ${ij}$ of one matrix to the corresponding ${ij}$ of the other. Matrix addition is commutative and associative, for instance, the following are valid:
There are other types of matrix addition operations including Direct Sum and Kronecker sum.
# construct a 2x2 matrix by reshaping a 1x4 array
g = np.array([1,2,3,4]).reshape(2,2)
g
array([[1, 2],
[3, 4]])
h = np.array([2,3,3,3]).reshape(2,2)
h
array([[2, 3],
[3, 3]])
f = np.array([5,4,3,-1]).reshape(2,2)
f
array([[ 5, 4],
[ 3, -1]])
g + h == h + g
array([[ True, True],
[ True, True]], dtype=bool)
if (g + h == h + g).all():
print("equations are commutative")
equations are commutative
if (g + ( h + f ) == (g + h) + f).all():
print("equations are associative")
equations are associative
g - h == h - g
array([[False, False],
[ True, False]], dtype=bool)
§Matrix Scalar Multiplication
Multiplying a scalar by a matrix multiplies each ${ij}$ element by the scalar.
Scalar multiplication is commutative.
$\boldsymbol{G}\theta = \theta\boldsymbol{G}$
theta = 5
g * theta
array([[ 5, 10],
[15, 20]])
theta * g
array([[ 5, 10],
[15, 20]])
§Trace
The trace of a matrix is the sum of the diagonal of a square ${n}$ x ${n}$ matrix, $\sum_{i=1}^n{a}_{ii}$.
a = np.array([1,2,3,4,5,6,7,8,9]).reshape(3,3)
a
array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
# use Numpy trace function
np.trace(a)
15
# extract and diagonal and sum
np.diag(a).sum()
15
§Matrix Multiplication
Matrix multiplication is associative and generally non-commutative.
§Standard Matrix Multiplication
Left multiplies right, for example $\boldsymbol{T}\boldsymbol{U}$, $\boldsymbol{T}$ multiplies $\boldsymbol{U}$. Valid standard matrix multiplication requires the inner dimensions be the same, for instance, the number of columns (${n}$) in the left matrix must match the number of rows (${m}$) in the right matrix.
$\boldsymbol{T}_{n} = \boldsymbol{U}_{m}$
The product matrix produced when multiplying ${\boldsymbol{T}}^{\boldsymbol{4}x3}$ ${\boldsymbol{U}^{3x\boldsymbol{2}}}$ will have the size $m = {4}$ , n = ${2}$
# create a range from 1 to 12 and reshape it into
# a 4x3 matrix
t = np.arange(1,13).reshape(4,3)
t
array([[ 1, 2, 3],
[ 4, 5, 6],
[ 7, 8, 9],
[10, 11, 12]])
Next, we can construct the $\boldsymbol{U}$ matrix by using a list comprehension in Python.
# create a range in steps of 2 from 2 to 12
u = np.arange(2,14,2)
# use a list comprehension to convert every other
# index in the array to a negative
u = [ i if idx % 2 else i * -1 for idx, i in enumerate(u)]
u = np.array(u).reshape(3,2)
u
array([[ -2, 4],
[ -6, 8],
[-10, 12]])
t.shape
(4, 3)
u.shape
(3, 2)
d = np.matmul(t,u)
d
array([[ -44, 56],
[ -98, 128],
[-152, 200],
[-206, 272]])
# alternative
t @ u
array([[ -44, 56],
[ -98, 128],
[-152, 200],
[-206, 272]])
d.shape
(4, 2)
# The @ operator calls the array's __matmul__ method
t @ u
array([[ -44, 56],
[ -98, 128],
[-152, 200],
[-206, 272]])
§Vector Dot Product
Matrix vector products will always be a row or column vector.
a = np.matrix(np.arange(2,26,2).reshape(4,3))
a
matrix([[ 2, 4, 6],
[ 8, 10, 12],
[14, 16, 18],
[20, 22, 24]])
x = np.matrix(np.flip(np.arange(.5,2,.5), axis=0)).T
x
matrix([[ 1.5],
[ 1. ],
[ 0.5]])
# vector dot product
b = a @ x
b
matrix([[ 10.],
[ 28.],
[ 46.],
[ 64.]])
d = np.matrix(np.arange(1,6).reshape(1,5))
d
matrix([[1, 2, 3, 4, 5]])
w = np.matrix(np.arange(1,6).reshape(5,1))
w
matrix([[1],
[2],
[3],
[4],
[5]])
d @ w
matrix([[55]])
w @ d
matrix([[ 1, 2, 3, 4, 5],
[ 2, 4, 6, 8, 10],
[ 3, 6, 9, 12, 15],
[ 4, 8, 12, 16, 20],
[ 5, 10, 15, 20, 25]])
§Matrix-Vector Multiplication
The result of multiplying a vector by a matrix or a matrix by a vector will always be a vector.
# construct a column vector with numpy using octave / matlab style
v = np.matrix('2; 3; 4')
v
matrix([[2],
[3],
[4]])
a = np.arange(1,10).reshape(3,3)
a
array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
a * v
matrix([[20],
[47],
[74]])
# transpose column vector v into a row vector
v.T * a
matrix([[42, 51, 60]])
§Geometric Vector Transformation
The following examples demonstrate 2d and 3d transformations.
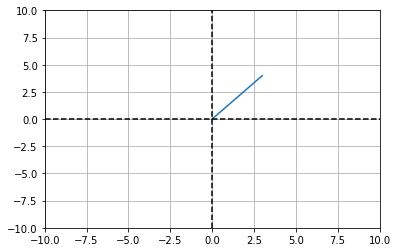
§2d Transformation
Transforming a 2d vector with a 2x2 matrix:
(3 * 1) + (4 * -2)
-5
# a vector at position 3, 4
v = np.matrix('3 ;4')
v
matrix([[3],
[4]])
# plot the vector v in "standard position"
plt.plot([0,v[0]],[0,v[1]])
# create a dashed line in the x axis
plt.plot([-10, 10],[0, 0],'k--')
# create a dashed line in the y axis
plt.plot([0, 0],[-10, 10],'k--')
# add some grid lines
plt.grid()
# fit the axis
plt.axis((-10, 10, -10, 10))
plt.show()
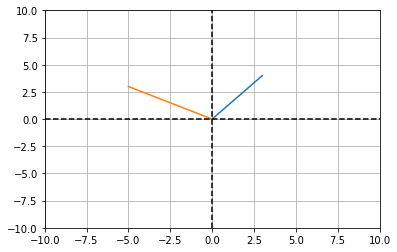
# create a matrix to be used in transforming the vector v
a = np.matrix('1 -2; 3 -1.5')
c = a @ v
c
matrix([[-5.],
[ 3.]])
# plot the vectors c and c in "standard position"
plt.plot([0,v[0]],[0,v[1]])
plt.plot([0,c[0]],[0,c[1]])
# create a dashed lines
plt.plot([-10, 10],[0, 0],'k--')
plt.plot([0, 0],[-10, 10],'k--')
# add some grid lines
plt.grid()
# fit the axis
plt.axis((-10, 10, -10, 10))
plt.show()
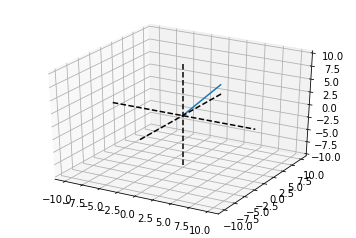
§3d Transformation
Next, transform a 3d vector with a 3x3 matrix:
# a vector at position 3, 4, 5
v = np.matrix('3 ;4; 5')
v
matrix([[3],
[4],
[5]])
# plotting the 3-dimensional vector from the
# standard position 0,0,0
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
ax.plot([0, v[0]],[0, v[1]],[0, v[2]])
# add some dashed lines across the x, y and z axis
ax.plot([0, 0],[0, 0],[-10, 10],'k--')
ax.plot([0, 0],[-10, 10],[0, 0],'k--')
ax.plot([-10, 10],[0, 0],[0, 0],'k--')
plt.show()
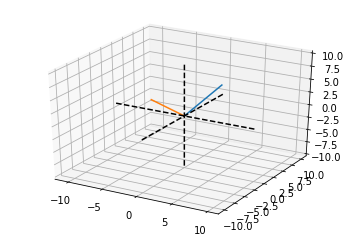
b = np.matrix('1 -4 .5; 3 -1.5 1.25; -1 .5 -.5')
b
matrix([[ 1. , -4. , 0.5 ],
[ 3. , -1.5 , 1.25],
[-1. , 0.5 , -0.5 ]])
c = b @ v
c
matrix([[-10.5 ],
[ 9.25],
[ -3.5 ]])
# plotting the 3-dimensional vector from the
# standard position 0,0,0
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
ax.plot([0, v[0]],[0, v[1]],[0, v[2]])
ax.plot([0, c[0]],[0, c[1]],[0, c[2]])
# add some dashed lines across the x, y and z axis
ax.plot([0, 0],[0, 0],[-10, 10],'k--')
ax.plot([0, 0],[-10, 10],[0, 0],'k--')
ax.plot([-10, 10],[0, 0],[0, 0],'k--')
plt.show()
§Multiplication with a Diagonal Matrix
When a regular matrix ($\boldsymbol{F}$) multiplies a diagonal matrix ($\boldsymbol{D}$), it has the effect multiplying each column by the non-zero value in the corresponding diagonal matrix column.
When a diagonal matrix ($\boldsymbol{D}$) multiplies a regular matrix ($\boldsymbol{F}$), it has the effect multiplying each row by the non-zero value in the corresponding diagonal matrix row.
# create a 3x3 matrix with values from 1 to 10
f = np.arange(1,10).reshape(3,3)
f
array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
# create a diagonal matrix
d = np.diag([2,4,5])
d
array([[2, 0, 0],
[0, 4, 0],
[0, 0, 5]])
d @ f
array([[ 2, 4, 6],
[16, 20, 24],
[35, 40, 45]])
f @ d
array([[ 2, 8, 15],
[ 8, 20, 30],
[14, 32, 45]])
§Order of Operations
Reverse the matrix order when operating (such as transpose) on multiplied matrices.
$\boldsymbol{X} = (\boldsymbol{A}\boldsymbol{B}\boldsymbol{C})^T = \boldsymbol{C}^T\boldsymbol{B}^T\boldsymbol{A}^T$
# create 3, 3x3 matrices using octave/matlab style notation
a = np.matrix('1 2 3; 4 5 6; 7 8 9')
b = np.matrix('4 2 1; 7 8 2; 1 2 3')
c = np.matrix('5 4 3; 2 1 2; 3 4 5')
print(f'matrix A =\n{a}\n\nmatrix B =\n{b}\n\nmatrix C =\n{c}\n')
matrix A =
[[1 2 3]
[4 5 6]
[7 8 9]]
matrix B =
[[4 2 1]
[7 8 2]
[1 2 3]]
matrix C =
[[5 4 3]
[2 1 2]
[3 4 5]]
x = (a * b * c).T
x
matrix([[195, 501, 807],
[164, 416, 668],
[181, 451, 721]])
np.array_equal(x, (a.T * b.T * c.T))
False
np.array_equal(x, (c.T * b.T * a.T))
True
§Hadamard Multiplication (element-wise)
Hadamard multiplication multiplies an element in the first matrix by the corresponding element in another. The Hadamard product is commutative, associative and distributive.
a = np.matrix('1 2; 3 4; 5 6')
b = np.matrix('6 5; 5 4; 4 3')
c = np.matrix('4 1; 3 2; 2 1')
print(f'matrix A =\n{a}\n\nmatrix B =\n{b}\n\nmatrix C =\n{c}\n')
matrix A =
[[1 2]
[3 4]
[5 6]]
matrix B =
[[6 5]
[5 4]
[4 3]]
matrix C =
[[4 1]
[3 2]
[2 1]]
d = np.multiply(a,b)
d
matrix([[ 6, 10],
[15, 16],
[20, 18]])
np.array_equal(d, np.multiply(b,a))
True
§Vectorizing a Matrix
Vectorizing a matrix is always done column-wise:
a = np.matrix('5 4 3; 2 1 0')
a
matrix([[5, 4, 3],
[2, 1, 0]])
# order=‘F’ means to flatten in column-major order
# see: https://docs.scipy.org/doc/numpy/reference/generated/numpy.ndarray.flatten.html
a.flatten(order='F')
matrix([[5, 2, 4, 1, 3, 0]])
§Frobenius Dot Product (inner product)
The Frobenius dot product or inner product is an element-wise product of two matrices consisting of a single number (as though they are vectors.) The matrices can be square or rectangular. However, they must have the same number of rows and columns.
see Frobenius inner product on Wikipedia for a detailed explanation.
The Frobenius inner product is a sum over all the elements in a Hadamard (element-wise) multiplication.
a = np.arange(1,13).reshape(3,4)
b = np.arange(1,4,.25).reshape(3,4)
# sum over Hadamard (element-wise) multiplication
# not as computationally efficient as other methods below
np.multiply(a, b).sum()
221.0
The dot product of vectorized matrices can also determine the Frobenius inner product.
b.flatten(order='F').T
array([ 1. , 2. , 3. , 1.25, 2.25, 3.25, 1.5 , 2.5 , 3.5 ,
1.75, 2.75, 3.75])
# Frobenius product using vectors
np.dot( a.flatten(order='F'),b.flatten(order='F') )
221.0
Calculating the trace of $\mathbf{A}^T \mathbf{B}$ is more computationally efficient than the methods above.
# Frobenius product using trace
# preferred method for computational performance
np.trace( a.T@b )
221.0
§Frobenius Norm (Euclidean Norm)
The norm of a matrix is the square root of the Frobenius dot product with itself.
np.sqrt( np.trace( a.T@a ) )
25.495097567963924
np.linalg.norm(a, 'fro')
25.495097567963924
§Rank
The rank $rank\left(\mathbf{A}\right) = r\left(\mathbf{A}\right)$ of a matrix is the number dimensions of information, specifically the number of linearly independent rows or columns. Rank reveals the amount of information contained in a matrix and is always a non-negative integer as it is related to the dimensionality of the matrix.
Rules:
- $rank\left(\mathbf{A}\right) \leq min\left({m},{n}\right)$
- $rank\left(\mathbf{A}+\mathbf{B}\right) \leq rank\left(\mathbf{A}\right) + rank\left(\mathbf{B}\right)$
- $rank\left(\mathbf{AB}\right) \leq min\left( rank\left(\mathbf{A}\right), rank\left(\mathbf{B}\right) \right)$
- $rank\left(\mathbf{A}\right) = rank\left(\mathbf{A^T}\mathbf{A}\right) = rank\left(\mathbf{A^T}\right) = rank\left(\mathbf{A}\mathbf{A^T}\right)$
Types:
- $rank\underset{{m}\times{m}}{\left(\mathbf{A}\right)} = {m} \implies $ Full Rank
- $rank\underset{{m}\gt{n}}{\left(\mathbf{A}\right)} = {n} \implies $ Full Column Rank
- $rank\underset{{m}\lt{n}}{\left(\mathbf{A}\right)} = {m} \implies $ Full Row Rank
- $rank\underset{{m}\times{n}}{\left(\mathbf{A}\right)} \lt {m,n} \implies $ Reduced / Deficient / Degenerate (Singular)
np.random.seed(0)
a = np.random.randn(6,3)
a
array([[ 1.76405235, 0.40015721, 0.97873798],
[ 2.2408932 , 1.86755799, -0.97727788],
[ 0.95008842, -0.15135721, -0.10321885],
[ 0.4105985 , 0.14404357, 1.45427351],
[ 0.76103773, 0.12167502, 0.44386323],
[ 0.33367433, 1.49407907, -0.20515826]])
np.linalg.matrix_rank(a)
3
b = np.full((5,5), 1)
b
array([[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1]])
np.linalg.matrix_rank(b)
1
Create a matrix of any size of a specific rank. The rank cannot be greater than m or n. Using random numbers gives a high assurance that we will get a full rank for the number of columns in $\mathbf{A}$ and the number of rows in $\mathbf{B}$.
rnk = 5
m = 50
n = 12
a = np.random.randn(m,rnk)
b = np.random.randn(rnk,n)
c = a @ b
np.linalg.matrix_rank(c)
5
c.shape
(50, 12)
§Shifting
Transform a reduced rank matrix into a full-rank matrix without significant changes to the data.
a = np.matrix('2 4 5; -2 -4 -2; 2 4 -8')
np.linalg.matrix_rank(a)
2
b = a + (.0001 * np.eye(3,3))
b
matrix([[ 2.0001, 4. , 5. ],
[-2. , -3.9999, -2. ],
[ 2. , 4. , -7.9999]])
np.linalg.matrix_rank(b)
3
§Vector Span with Rank
Using rank to determine if a set of vectors spans a matrix. If the rank of a matrix increases with the addition of a vector, then the vector was not in the span of the matrix.
$\vec{v}$ is in the span of matrix $\mathbf{A}$.
$\vec{w}$ is not in the span of matrix $\mathbf{A}$.
v = np.array([[5], [8], [12]])
a = np.matrix('1 2 3 4; 4 5 6 7; 8 9 10 11')
a
matrix([[ 1, 2, 3, 4],
[ 4, 5, 6, 7],
[ 8, 9, 10, 11]])
np.linalg.matrix_rank(a)
2
b = np.append(a, v, axis=1)
b
matrix([[ 1, 2, 3, 4, 5],
[ 4, 5, 6, 7, 8],
[ 8, 9, 10, 11, 12]])
np.linalg.matrix_rank(b)
2
w = np.array([[0], [0], [2]])
c = np.append(a, w, axis=1)
np.linalg.matrix_rank(c)
3
Linear Algebra: Python Series - View all articles in this series.